 Fraunhofer-Institut für Produktionstechnologie IPT
Fraunhofer-Institut für Produktionstechnologie IPT
© Fraunhofer IPT

© Fraunhofer IPT
Forschungsprojekt »GroRoLas3D«
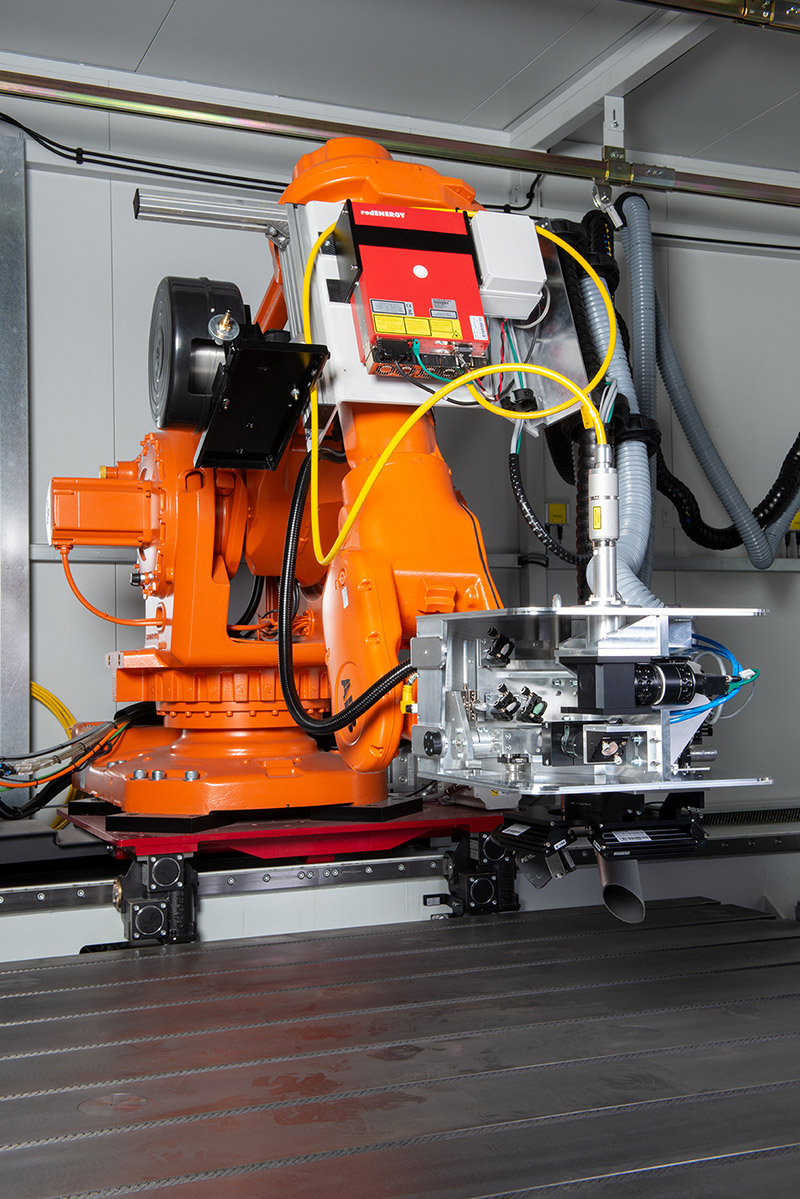
Ziel des Projekts »GroRoLas3D« war die Entwicklung einer Systemlösung für das kostengünstige, großformatige Laserstrukturieren von freigeformten, metallisch-reflektierenden Bauteiloberflächen mithilfe eines konventionellen Industrieroboters.
Positionsgenauigkeit dank Positionsmarkierungen und Bildanalyse-Algorithmen
Das Projekt baute auf den Ergebnissen des Projekts »RoboTex« auf, in dessen Rahmen bereits der wirtschaftliche Einsatz eines Industrieroboters für das großflächige Laserstrukturieren von matten und lackierten Oberflächen demonstriert werden konnte. Um die geforderte Positionsgenauigkeit für das nahtlose Laserstrukturieren zu gewährleisten, brachte ein Laser zunächst Positionsmarkierungen in die Bauteiloberfläche ein. Diese Markierungen wurden mit der Kamera des Strahlführungssystems, das sich am Roboter befindet, aufgenommen. Anhand der Kamerabilder konnten mithilfe intelligenter Bildanalyse-Algorithmen die Markierungen bezüglich ihrer Lage, Größe, Orientierung und geometrischer Verzerrung ausgewertet werden. Positionsabweichungen des Roboters zur Oberfläche konnten mithilfe dieser Informationen berechnet und die Bahnplanung für die Laserstrukturierung entsprechend adaptiv angepasst werden.
Kompensation von Reflexionssignalen und neue Strategien zur Referenzierung
Im Gegensatz zu matten Oberflächen ist die Bilderfassung bei reflektierenden und stark gekrümmten Oberflächen deutlich erschwert. Diffuse Beleuchtungsverhältnisse und eine unzureichende Tiefenschärfe über das gesamte Bildfeld machen das Erkennen der eingebrachten Lasermarkierungen mit der bestehenden Systemlösung auf solchen Oberflächen nahezu unmöglich. Dieses Defizit stellt ein signifikantes Hindernis für Transfer und Implementierung dieses Technologieansatzes ins industrielle Produktionsumfeld dar.
Innerhalb des Projekts »GroRoLas3D« wurde daher die roboterbasierte Technologie weiter erforscht und die bisherige Systemlösung für den automatisierten Einsatz in der industriellen Produktion weiterentwickelt. Dazu wurden zunächst intelligente, softwarebasierte Algorithmen zur Kompensation der störenden Reflexionssignale in Kombination mit einer adaptierten Polarisationsbeleuchtung entwickelt und in die bestehende Softwarelösung implementiert. Um die optische Bildqualität weiter zu steigern, wurde zudem das Kamerasystem des Strahlführungssystems modifiziert. Zeitgleich wurden Prozessuntersuchungen zum Einsatz neuer Markierungen und Referenzierungsstrategien durchgeführt, um den roboterbasierten Laserstrukturierungsprozess robuster und gleichzeitig schneller zu machen.
Reduktion der Kosten für die Laserstrukturierung um bis zu 80 Prozent
In dem »GroRoLas3D«-Projekt entwickelte das Fraunhofer IPT eine Lösung, die die Investitionskosten für die Laserstrukturierung großflächiger Bauteile mit reflektierenden, stark gekrümmten Oberflächen um bis zu 80 Prozent senken kann. Mit dem in dem Projekt erarbeiteten System lohnt sich das Laserstrukturieren von großformatigen Bauteilen für eine größere Anzahl von Unternehmen.
Das Projekt Wurde durch das Bundesministerium für Wirtschaft und Klimaschutz (BMWK) gefördert.